
边学边用linux-进程管理
目录
进程管理是操作系统的重中之重,本文将对Linux的进程管理,以及和进程调度、资源共享相关的各方面内容进行总结。
进程状态
- 状态类型:
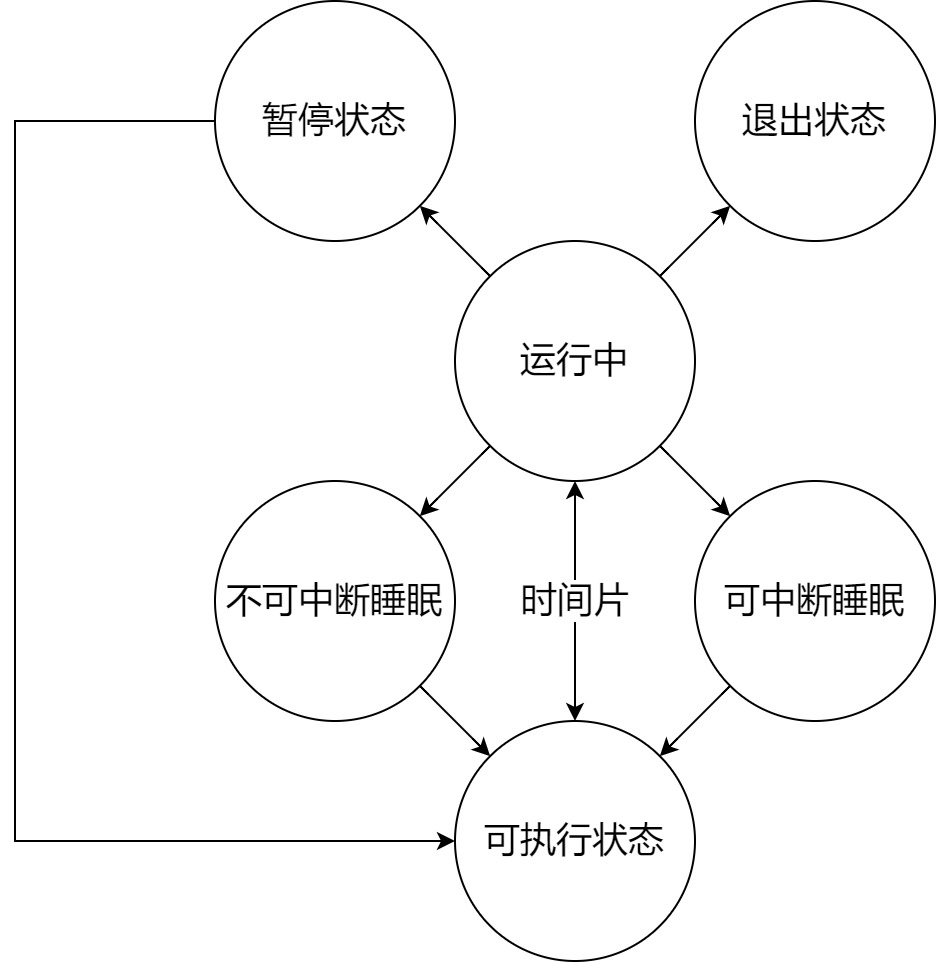
- R(TASK_RUNNING):可执行状态
- S(TASK_INTERRUPTIBLE):可中断的睡眠状态
- D(TASK_UNINTERRUPTIBLE):不可中断的睡眠状态
- T(TASK_STOPPED、TASK_TRACED):暂停状态、跟踪状态
- Z(TASK_DEAD、EXIT_ZOMBIE):退出状态,僵尸进程
- X(TASK_DEAD、EXIT_DEAD):退出状态,即将销毁
- 示意图
进程调度
- 进程调度是现代分时操作系统的核心功能之一。Linux从2.6.23开始引入CFS(Completely Fair Schedule)公平调度机制。
- 基础关键词:
- 调度器:负责实际完成进程调度过程的模块
- 调度策略:不通进程可能采取不通的调度策略,调度器针对进程所使用的策略,判断是否将其放入可运行队列。实际实现中往往会结合多种策略。
- CFS策略:目的是尽量让所有进程能占有的CPU时间保持一致
- FCFS(First Come First Service)策略:先来先服务,不基于时间片调度,只要未主动退出或阻塞,一直占有CPU
- RR(Round-Robin)策略:时间片轮转,进程按入队顺序分别执行自己的时间片,时间片到期、阻塞则移动到队尾
- SPF策略:短进程优先,按照估计时间,优先执行短进程,只要未主动退出或阻塞,一直占有CPU
- 多级反馈队列策略:分为多个优先级不同的队列,最高优先级的时间片最短,新任务添加到最高优先级队列中,以FCFS执行。如果无法在指定时间片内完成,则移动到下一优先级队列队尾,只有当高优先级队列空了,才以FCFS运行下一优先级队列
- 优先级调度算法:具体分为非抢占式优先级、抢占式优先级两种。非抢占式允许进程一直运行,结束后再调度其他高优先级进程。抢占式则是只要有更高优先级进程出现,直接调度更高优先级进程开始运行。
- 操作系统区别:
- Unix:单纯的分时操作系统,使用时间片轮转的多级反馈队列策略
- Linux:分为实时进程和普通进程两种,实时进程采用带有静态优先级的FCFS、RR,尽量保证实时性,普通进程使用动态的优先级调度。实时进程也优先于普通进程。
- Windows:使用时间片轮转,基于优先级的抢占式调度
- Linux进程级别:SHED_FIFO、SHED_RR、SHED_NORMAL这三种进程使用各自的调度策略
- 组调度:由于部分进程可能会占用大量CPU,而对其他进程不公平,可以将相关的一组进程设置为组调度,此时这一组的进程将会被看作是一个调度实体(即一个进程)。尤其是在多用户操作系统中常见,避免A用户的使用影响到B用户的体验。
- CFS的实现:
- 时间记账:
- 相关数据结构:task_struct(进程信息)、sched_entity(进程调度相关信息)、ofs_rq(红黑树)
- 基本原理:
- 计算虚拟运行时间vruntime,根据进程的nice值,计算出当前进程的时间片权重,并累加到vruntime上
- 进程选择
- 红黑树:按照vruntime为键值构造的,最左节点就是vruntime最小的节点,也是最应当被优先调度的
- 添加和删除进程的过程就是将进程节点添加到红黑树中的过程
- 所有在红黑树中的节点,都是拿到时间片就可以立刻运行的。阻塞的进程会被移除。
- 红黑树:按照vruntime为键值构造的,最左节点就是vruntime最小的节点,也是最应当被优先调度的
- 调度器入口
- 调度时机:并不是所有时机都适合调度,比如时钟中断是常见的调度机会,但调度并不能在中断上下文中进行,很多事件都可以对调度标记位进行标记,但调度执行的机会一般仅包括:
- 系统调用返回到用户空间
- 中断返回到用户空间
- 中断返回到内核空间,需要内核支持内核抢占,不过内核抢占基本上已经是目前 linux 的默认配置
- 重新使能内核抢占时
- 进程主动放弃CPU
- schedule()函数,其内部的主要流程有
- 禁止抢占,避免调度嵌套。关闭local apic中断,避免和中断竞争
- 针对上一个进程的处理,如果被阻塞,则需要进行移除
- 选择下一个执行的进程,会根据各种调度策略优先级进行查找,比如此时空闲进程数量不等于cfs调度器管理的进程数量,则意味着有实时进程存在,则优先遍历实时进程所用的各类调度策略
- 对上一个进程的进程信息进行最后的处理,更新其运行时间等数据,写回到红黑树中,如果是组调度,则会对同组的所有进程进行处理和修改
- 将进程现场保存,各寄存器写回内存,将新进程相关数据加载到寄存器。做一次内存屏障,将虚拟内存相关数据切换成新进程。恢复抢占,开启local apic中断,将控制权交给新进程
- 调度时机:并不是所有时机都适合调度,比如时钟中断是常见的调度机会,但调度并不能在中断上下文中进行,很多事件都可以对调度标记位进行标记,但调度执行的机会一般仅包括:
- 睡眠和唤醒
- 当进程进入阻塞条件后,调度器会将其从红黑树中移除
- 当进程等待的阻塞条件满足后,调度器会将其重新加入红黑树。对于可中断的休眠情况,其等待的条件更宽泛。
- 时间记账:
进程间通信
- 按所处空间分类:
- 内核空间:消息队列、信号
- 用户空间:共享内存
锁
- 锁的种类
- 自旋锁(SpinLock):在目标资源被锁时不阻塞当前线程,而是本地轮询等待,适合用于临界区很小的业务,能避免线程切换带来的性能损失
- 互斥锁(Mutex):在目标资源被锁时阻塞当前线程,解锁之后由系统负责唤醒
- 读写锁(RWLock):共享互斥锁,读模式共享,写模式互斥,更为合理的互斥锁。但是需要考虑到读、写模式都可能面临饥饿,需要进行一定的策略来平衡读写需求
- RCU锁(Read Copy Update Lock):更高级的读写锁,支持多读多写,实现复杂
- 可重入锁(可递归锁):普通锁默认都是不可重入的,即同一线程在上锁后再获取同一个锁会陷入死锁,可重入锁则支持多次上锁
- 条件变量:需要和互斥锁一同使用,更偏向于用来等待其他线程确认某个条件达成,来唤醒目标线程
- 锁实现的相关软硬件原理:
- 关闭中断:操作系统层面,在上锁时,需要考虑时钟中断等中断程序,因此为了避免多个线程同时竞争上锁(尤其是在上锁过程中出现中断),会进行关闭中断
- CAS和内存总线:硬件层面,指令上目前有CAS指令,可以原子指令上锁,此外还提供了多核处理器时,锁内存总线,以此来避免多核之间的竞争
- 缓存锁:锁内存总线显然造成很高的性能损失,明明只需要锁一个变量,现在所有CPU和内存都无法通信了,开发者基于CPU的内部缓存,进一步开发了缓存锁,即利用缓存行的MESI状态,结合RFO指令,完成多CPU之间的互斥性。但缓存锁存在失效情况,如锁定数据跨越多个缓存行(缓存的最小单位),或者处理器不支持缓存锁定。此时仍然只能锁定内存总线。
- 内存屏障:
- 即使有了缓存锁的实现,还会有性能问题,因为RFO指令的执行并不是立刻,发出该指令的CPU只能等待,而接到RFO的指令又必须立刻放下自己的工作,对相应缓存无效化。为了解决这个性能问题,又引入了Store Buffer和Invalidate Queue,分别对应打算写数据和数据被无效化的情况,CPU发出RFO后不需要等待反馈,可以先将处理结果写入Store Buffer,只有RFO收到确认结果之后才会真正执行Store Buffer;同样的当接收到缓存无效指令,也会先放到Invalidate Queue中,等待CPU空闲时再执行。
- 写屏障保证在写之前,所有的Store Buffer都执行,读屏障保证在读之前,所有的Invalidate Queue都执行。具体到锁上,上锁时会建立读屏障,保证临界区资源最新,释放锁时会建立写屏障,保证临界区资源更新写回。
- 关于内存屏障,不同的语言提供了不同的保证,比如Java、C++各自提出了不通的解决方案,来实现一定程度上对内存一致性模型的使用。如使用松散的一致性要求(允许重排),或者使用严格的一致性要求(禁止重排)。对不同场景下LoadLoad(本指令之前的所有加载和之后的所有加载)、StoreStore(本指令前的所有写入和之后的所有写入)、LoadStore、StoreLoad需求进行控制。
缓存锁和RFO指令也是导致伪共享的核心原因,当临界资源位于同一个缓存行内时,多核的竞争使用会造成反复锁定其他CPU,造成业务逻辑性能甚至差于单核串行处理 由于现代编译器和CPU都会对执行顺序进行优化,因此内存一致性模型对并发控制中的锁机制的影响也非常大。不通的CPU硬件架构对内存一致性模型实现方式不同。
信号
linux开发中,在进程中对信号的处理是非常重要的。信号是一种软中断,信号的设计继承自Unix,因此有不可靠信号(SIGRTMIN前,信号可能丢失),可靠信号(后面定义的信号,支持信号队列,排队发送),在系统中可以通过man 7 signal,查看系统中和信号相关的内容。
信号相关的操作
- 发送:
raise(int sig),kill(pid_t pid, int sig) - 接收:
sighandler_t signal(int signum, sighandler_t handler),更推荐int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact) - 处理:用户定义的任何满足
typedef void(*sighandler_t)(int)函数签名的函数 - 忽略:忽略将会调用默认处理。
- 特例:SIGKILL(杀死)、SIGSTOP(暂停)不能忽略,不能捕获。
常见的信号
- SIGHUP :终端结束信号
- SIGINT :键盘中断信号(Ctrl - C)
- SIGQUIT:键盘退出信号(Ctrl - \)
- SIGPIPE:浮点异常信号
- SIGKILL:用来结束进程的信号
- SIGALRM:定时器信号
- SIGTERM:kill 命令发出的信号
- SIGCHLD:标识子进程结束的信号
- SIGSTOP:停止执行信号(Ctrl - Z)
- SIGSEGV:无效的内存访问
信号处理函数应当满足可重入要求
- 不能使用外部的任何全局变量,以及其他可能会使用到这些变量的函数
- 不调用malloc和free
- 不调用标准I/O函数(可以,但不推荐)
也因此,我们可以实现对于一些崩溃情况的恢复,避免单一线程挂掉,进程直接挂掉
// 自定义信号处理函数示例
#include <stdio.h>
#include <signal.h>
#include <stdlib.h>
#include <setjmp.h>
static jmp_buf buf;
// 自定义信号处理函数,处理自定义逻辑后再调用 exit 退出
void sigHandler(int sig) {
// 不建议,这里仅作测试
printf("Signal %d catched!\n", sig);
// exit(sig);
longjmp(buf,1);
}
int main(void) {
signal(SIGSEGV, sigHandler);
int *p = (int *)0xC0000fff;
if(!setjmp(buf)){
*p = 10; // 针对不属于进程的内核空间写入数据,崩溃
}
else
{
printf("exit safely\n");
}
return 0;
}
部分源代码
// 部分字段
struct task_struct {
volatile long state;
unsigned long flags;
int sigpending;
mm_segment_t_addr_limit;
}